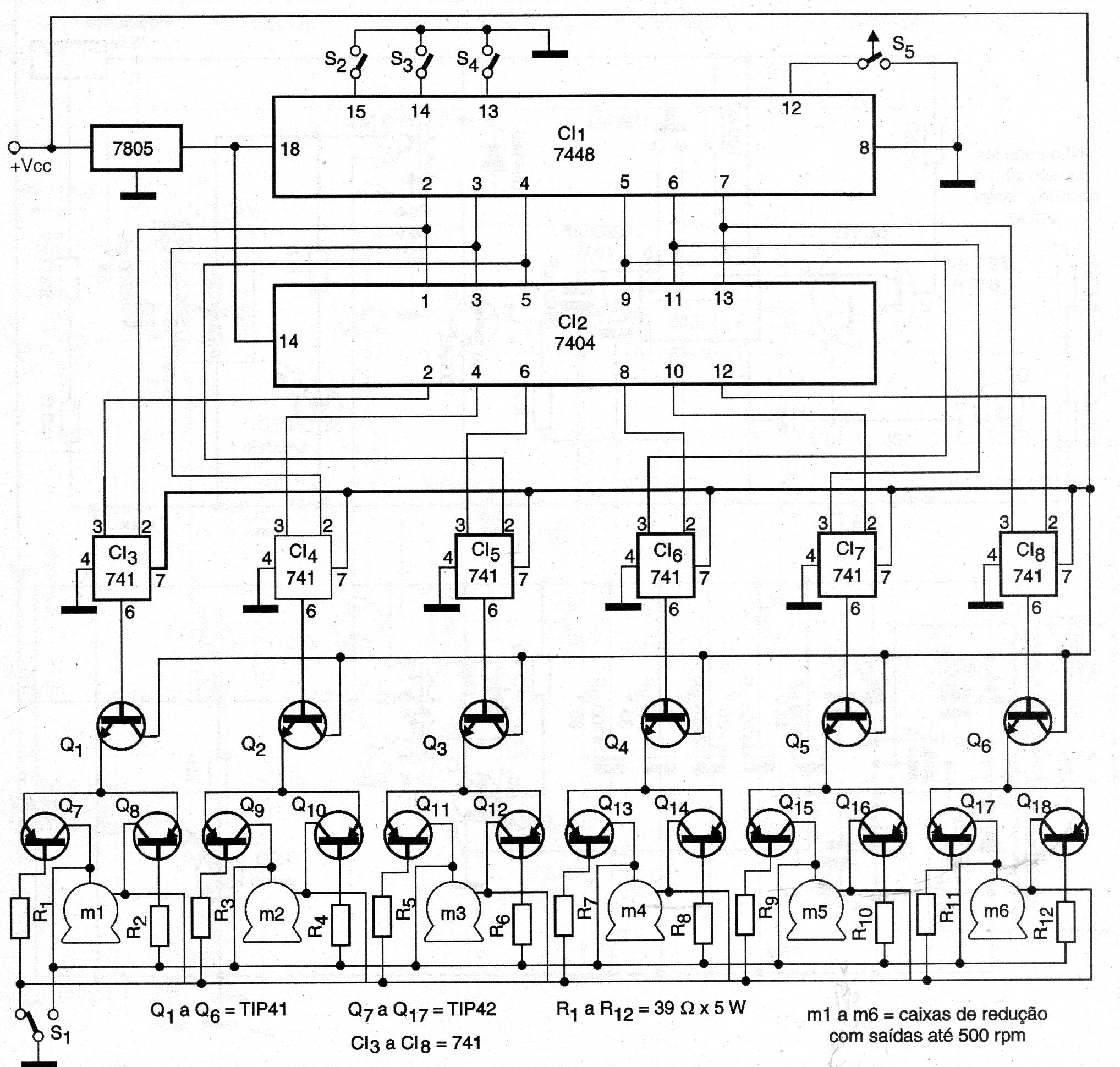
La idea de este automatismo se puede extender a otras aplicaciones que involucran el control de motores de corriente continua a partir de entradas lógicas. Sería un buen shield para microcontroladores con pocos cambios. Las llaves S2, S3 y S4 determinan qué motor será seleccionado a través de lógica. S1 establece el sentido de rotación del motor. En un escudo o aplicación robótica, las llaves de control pueden ser sustituidas por sensores y el tipo de accionamiento también. Otra posibilidad consiste en sustituir los transistores de accionamiento por FET de potencia para que motores de corrientes más intensas puedan ser controlados. Ver que las señales lógicas de control pueden ser generadas por microcontroladores o incluso por la salida de un PC ya que la lógica usada es TTL.