




En los proyectos de mecatrónica con microcontroladores o circuitos lógicos puede ser necesario invertir el sentido de rotación de un motor a partir de una señal digital de control. El circuito propuesto es bastante interesante porque también incluye una llave de habilitación que permite apagar el motor.
Los motores de corriente continua controlados por circuitos digitales se encuentran en la mayoría de los proyectos de mecatrónica.
¿Cómo invertir la rotación de un motor alimentado por un circuito de corriente continua sin usar relés y sin la necesidad de fuentes simétricas?
Si este es el problema del lector, vea en este circuito cómo esto se puede hacer de manera sencilla usando componentes comunes.
El circuito propuesto puede funcionar con motores de 6 a 12 volts y con corrientes que pueden llegar a varios amperios dependiendo sólo de los transistores de efecto de campo de potencias empleados.
La señal lógica de control debe ser compatible con la tecnología CMOS, pero nada impide que se utilice un circuito TTL o CMOS con alimentación de 5 volts o mismo 3,3 V.
También observamos que, incluso el circuito que se da sobre la base de transistores de efecto de campo de potencia (Power FET) también funcionará con un rendimiento ligeramente menor si se utilizan Darlingtons de potencia del tipo NPN con resistores limitadores de corriente en las bases. Como hacer esta modificación explicaremos en el transcurso del artículo.
COMO FUNCIONA
En nuestro proyecto conectamos un motor de corriente continua a cuatro transistores de efecto de campo de potencia que forman un puente de Wheatstone.
Sin embargo, en este circuito los transistores están conectados de modo que el puente sólo se equilibra cuando los cuatro transistores están en el corte que es la condición de parada que veremos más adelante.
En las otras dos condiciones posibles los transistores conducen dos a dos.
Así, cuando Q1 y Q3 están saturados, los transistores Q2 y Q4 obligatoriamente están en el corte y la corriente fluye en el sentido indicado en la figura 1.
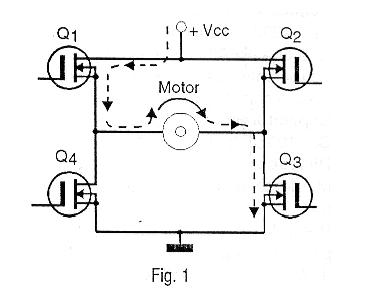
En estas condiciones tenemos un sentido de rotación para el motor.
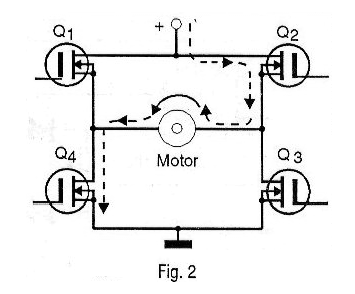
En la segunda condición posible de funcionamiento para el circuito, los transistores Q2 y Q2 están saturados mientras que Q1 y Q3 están en el corte. El resultado es la inversión del sentido de rotación del motor, pues la corriente circulará de la forma mostrada en la figura 2.
Para obtener las dos condiciones iniciales de rotación del motor utilizamos dos variadores obtenidos a partir de dos puertas disparadoras de un circuito integrado 4093.
Estas puertas se conectan de dos formas: cuando la llave S1 está en la posición (a) y la entrada de control de las puertas va al nivel alto, funcionan como inversores. Así, garantizamos que en los transistores Q1 y Q3 los niveles lógicos son opuestos a los de los transistores Q2 y Q4 y tengamos dos sentidos de rotación.
Sin embargo, cuando la llave se lleva a la posición (b) las salidas de las puertas serán obligatoriamente cero y los transistores estarán en el corte. Esto hará que el motor no reciba alimentación.
Si en lugar de esta clave colocar estas entradas en el nivel bajo conecta un circuito externo de control, este control puede hacer que el motor gire o no. El sentido dependerá del nivel de señal de la otra entrada.
MONTAJE
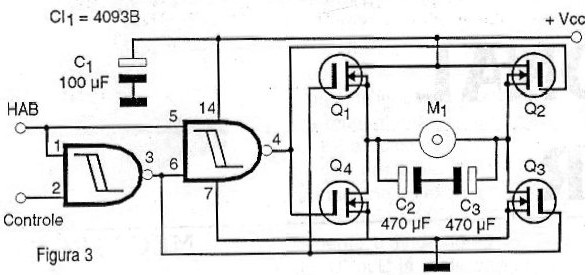
En la figura 3 tenemos el diagrama completo del control.
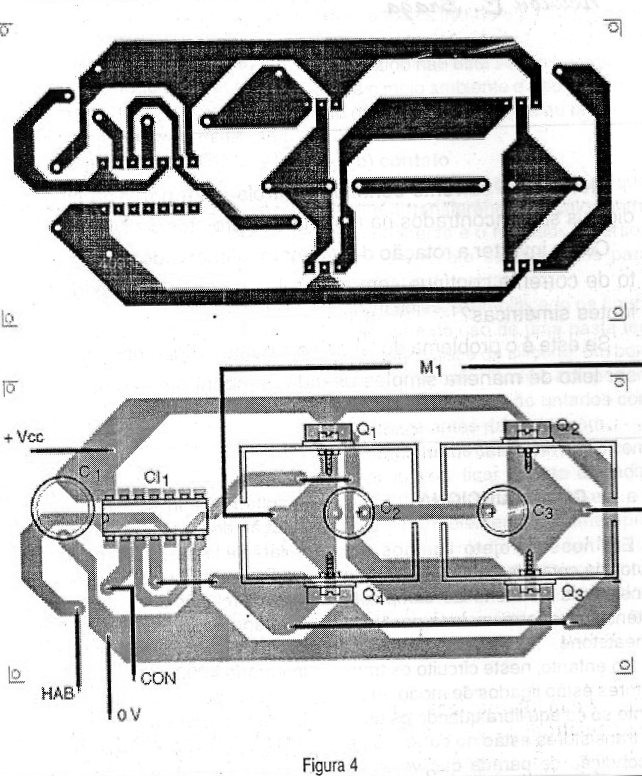
La disposición de los componentes en una placa de circuito impreso se muestra en la figura 4.
Los transistores deben estar dotados de radiadores de calor según la potencia del motor. Los motores de hasta 2 o 3 amperios pueden ser controlados sin problemas por la mayoría de los FET de potencia disponibles en el mercado.
Cualquier FET de potencia de canal N con tensión por encima de 100 voltios y corriente por encima de 3 ampères se puede utilizar sin problemas en este circuito.
Los capacitores en oposición en paralelo con el motor son importantes para eliminar transitorios que tanto pueden afectar los transistores como también el propio circuito integrado, a partir de la fuente de alimentación.
El circuito integrado se puede montar en un zócalo DIL para mayor seguridad y su posición debe ser estrictamente observada.
Para un control manual del motor podemos utilizar el circuito de la figura 5.
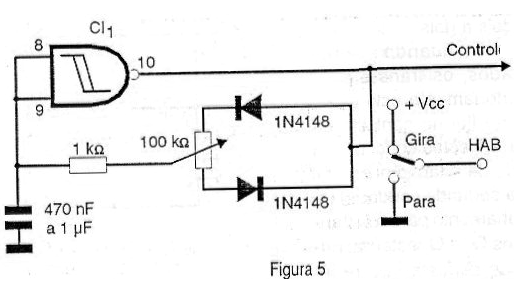
Este circuito utiliza dos llaves comunes para invertir la rotación del motor para accionarlo.
La configuración basada en Darlingtons de potencia se muestra en la figura 6.
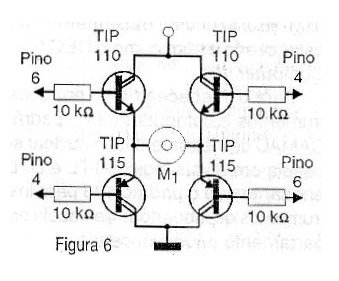
Cualquier Darlington NPN con tensión máxima entre colector y emisor de al menos 50 volts y corriente a partir de 2 ampères o de acuerdo con el motor usado, puede ser experimentado. Para los Darlingtons, se puede notar una pequeña caída de rendimiento con alimentación de 6V dado que la caída de tensión en estos componentes es mayor que en los FET de potencia.
PRUEBA Y USO
Para probar el aparato basta montar el circuito de control con las llaves y verificar si el motor responde a los controles.
Si nota un calentamiento excesivo de los transistores, aumente el tamaño de los radiadores de calor.
Para usar recuerde los límites de tensión de control ya que no podemos aplicar en la entrada una tensión mayor que la usada en la alimentación del CI.
Una idea interesante que puede ser estudiada por los lectores es aplicar pulsos con relación marca-espacio controlada de modo a poder tener la rotación en el sentido deseado y también controlar la velocidad. Las muñecas con esta relación marca-espacio controlada se aplicar a la entrada de control de parada y no a la entrada de control de sentido de giro.
Semiconductores:
CI-1 - 4093 - circuito integrado CMOS
Q1 a Q4 - IRF632 o cualquier equivalente - transistores de efecto de campo de potencia.
Capacitores:
C1 - 100 uF x 16 V - electrolítico
C2, C3 - 470 uF x 25V - electrolíticos
Varios:
M1 - Motor de corriente continua - ver texto
S1 - Llave de 1 polo x 2 posiciones
Placa de circuito impreso, zócalo para el circuito integrado, radiadores de calor para los transistores, hilos, soldadura, fuente de alimentación, etc.